
{kind=link}
四軸穿越機和四軸航拍機能代替人類的視角在空中遨遊,兩者的外形十分相似,都是由遙控器進行操控的「無人機」,大多人統稱他們為「四軸機」,主要分別是應用上不一樣。
竹蜻蜓的飛行原理和四軸機很相似,但竹蜻蜓只單靠一隻螺旋翼來令竹蜻蜓上升或下降。竹蜻蜓的螺旋翼有傾斜角度,當竹蜻蜓的螺旋翼向逆時針方向轉動時,旋轉的螺旋翼把空氣向下推,引致空氣向下流動,同時空氣會產生一股向上的反作用力給予竹蜻蜓,令它向上升起。
竹蜻蜓看飛行原理
根據牛頓第三定律:作用力同反作用力成正比,但方向相反。竹蜻蜓向下的作用力愈大,產生向上的反作用力就會愈強。隨著螺旋翼斜度的改變及轉動速度的增加,使向上升起的力大於竹蜻蜓的重量時,就能驅使竹蜻蜓向上飛。
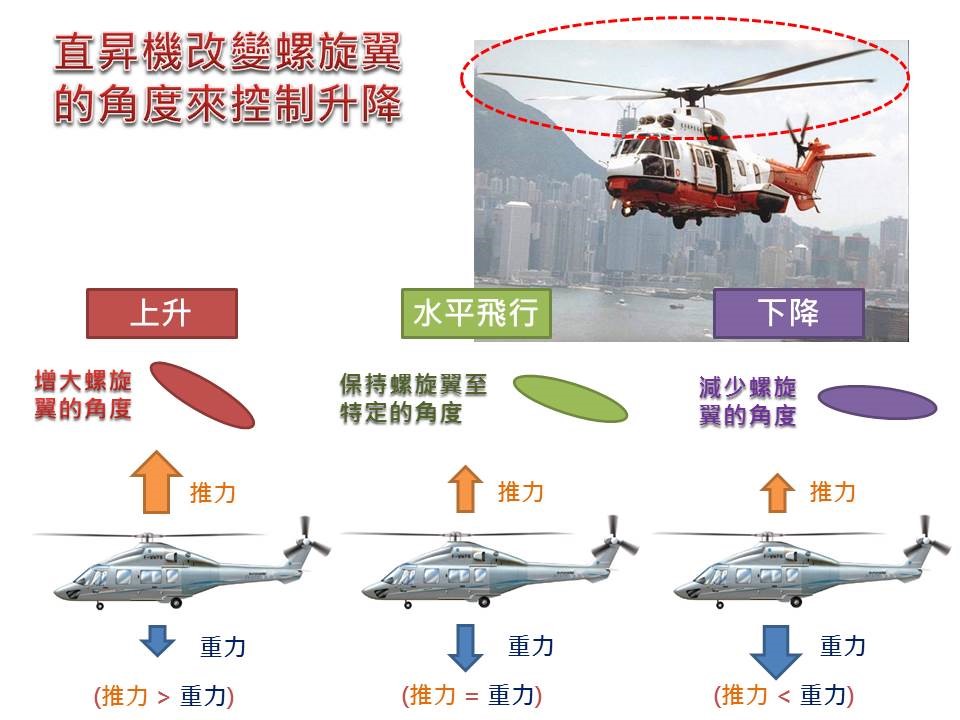
不過,竹蜻蜓的螺旋翼向順時針方向轉動時,旋轉的螺旋翼把空氣向上推,引致空氣向上流動,同時空氣會產生一股向下的反作用力給予竹蜻蜓,令竹蜻蜓下降。在日常生活中的大型直升機就應用了以上原理,而直升機的螺旋翼就可以改變角度來控制升降。
四軸機怎樣飛行呢?
四軸機上分別裝有四隻螺旋翼,它的螺旋翼是固定的,不能像直升機的可以調節螺旋翼傾斜度。四軸機的每隻螺旋翼均接駁摩打,當摩打轉動時就能帶動螺旋翼向順時針方向或逆時針方向旋轉,四軸機就需要依靠改變摩打轉動的速度來控制它的飛行方向及升降。
四軸機的數學
四軸機的螺旋翼設計有數學中所學的旋轉對稱圖形,若果不是旋轉對稱的設計,就不能產生穩定的推動力。從俯視的角度去觀察四軸機,大部分的四軸機的外形都是軸對稱,軸對稱的設計有助於飛行時容易取得平衡。

飛行模式
四軸穿越機飛行工程
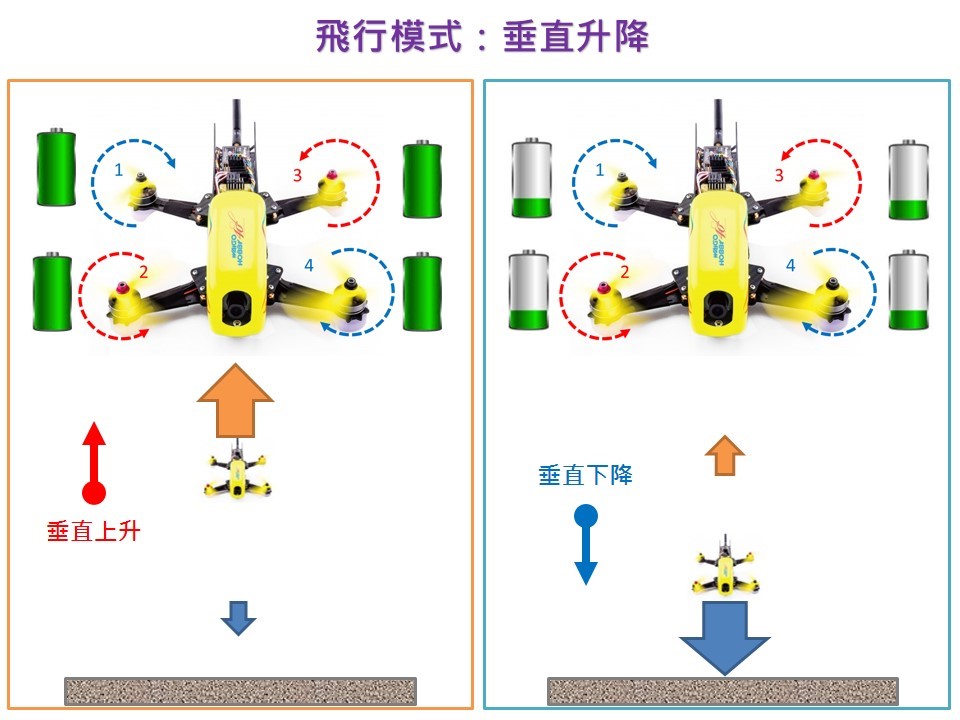
四軸穿越機的 4 個螺旋翼以對角方式編成兩組,兩組螺旋翼的傾斜角度是相反,同一組內的相同。四個螺旋翼可以利用不同號碼表示,1號螺旋翼和 3 號螺旋翼屬於同一組,並以順時針方向旋轉,而 2 號螺旋翼和 4 號螺旋翼則以逆時針方向旋轉,兩組螺旋翼所產生的反扭矩互相作用平衡機身,透過調節四個螺旋翼的轉速以達到控制升降及移動效果。
垂直升降
當增加四個螺旋翼的輸出功率,讓反扭矩保持平衡,令產生的總拉力克服體重量時就會垂直上升。下降則需降低四個螺旋翼的功率,反扭矩保持平衡,當產生的總拉力小於體重量時就會垂直下降。
水平移動
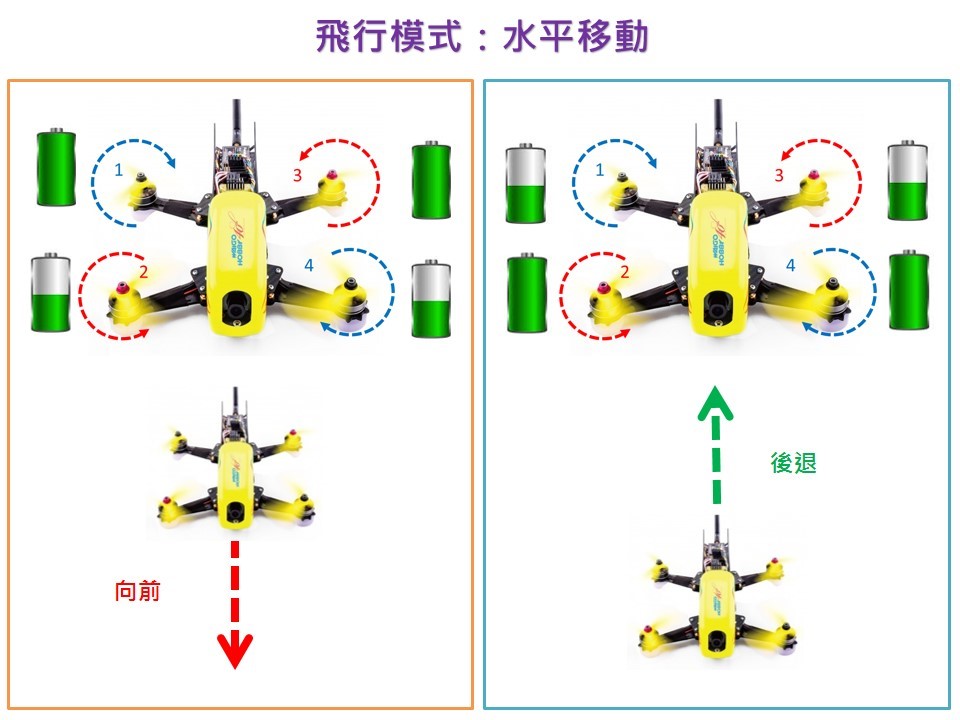
四軸穿越機要水平向前飛行,就要增加 1 號和 3 號螺旋翼的功率,其他兩個功率不變。如要水平向後飛行,就要增加 2 號和 4 號螺旋翼的功率,而1號和3號螺旋翼的功率不變。
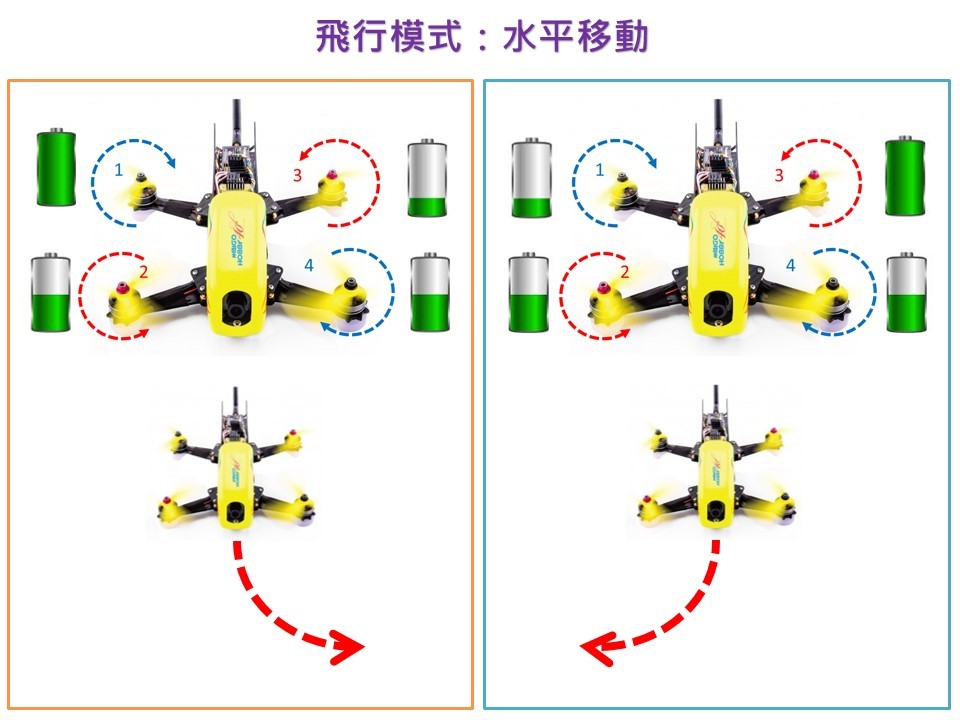
如要轉向 3 號螺旋翼方向移動,就要降低 3 號螺旋翼的功率,提升 1 號螺旋翼的功率,其他兩個功率不變。反之,要轉向 1 號螺旋翼方向移動,就要增加 3 號螺旋翼的功率,減少 1 號螺旋翼的功率,其他兩個功率不變。
運用數據及科技保持平衡
四軸機在飛行時,會因周邊的氣流改變而影響到飛行穩定性,那麼如何可以保持平衡?在四軸機上還有不同的電子零件,分別是飛行控制器、陀螺儀、電子羅盤、氣壓計和 PID 控制等,他們互相配合以協調保持四軸機飛行時的平衡。
飛行控制器
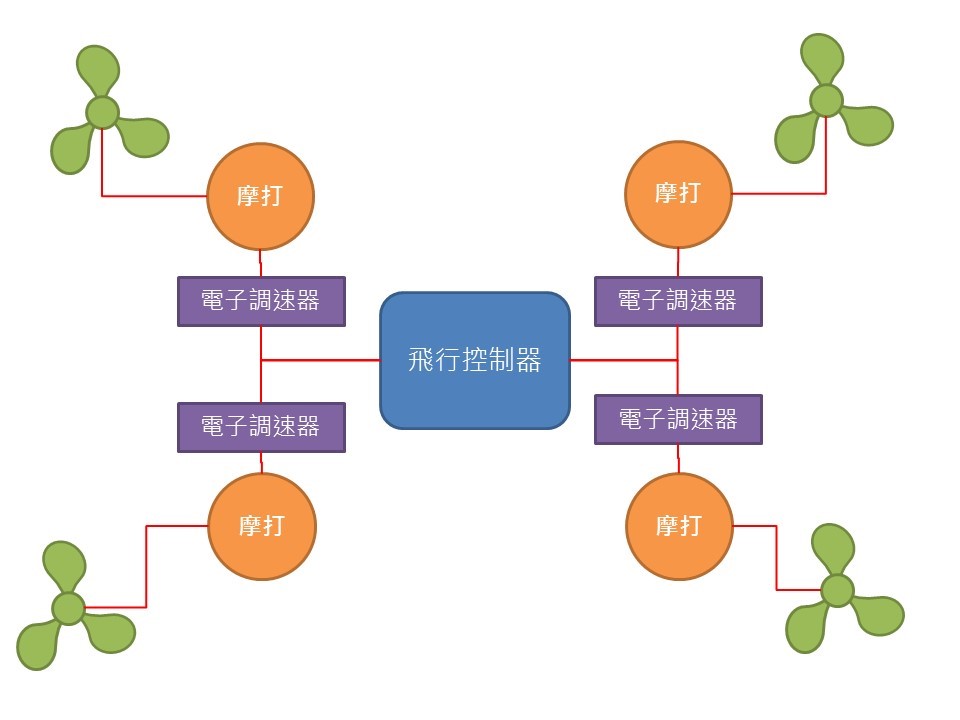
飛行控制器負責控制四軸機平衡和運動的裝置,它是一個集成微控制器、電子調速器、連接不同的感測器(陀螺儀、電子羅盤和氣壓計)等裝置,負責處理從感測器接收得來的訊息,是四軸機的核心控制部分。
PID 控制器
PID 控制器是控制四軸機的飛行穩定的,通過飛行參數來進行調整,讓四軸機可以在空中保持平衡,不會出現任意的方向傾倒。在四軸機身上還有很多不同的 STEM 元素,只要你在製作四軸機或操控四軸機時,多閱讀有關資料、多與四軸機的 KOL 交流,自然可以體會更多有趣的 STEM。